
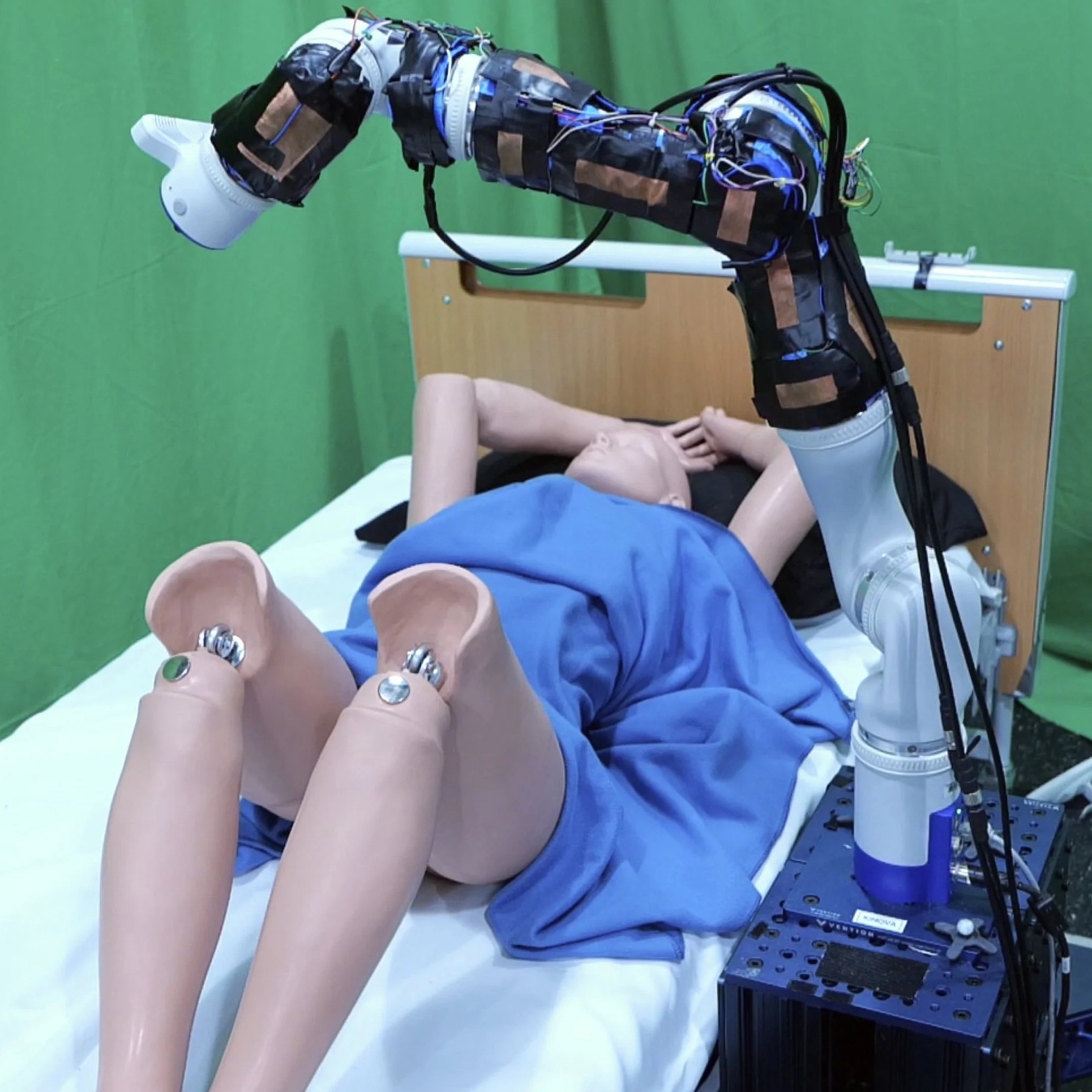
TACTIC: Tactile and Vision Conditioned Contact Centric Control for Whole-Arm Manipulation
WAM-Plan: Contact-Rich Global Planning for Whole-Arm Manipulation

Robot Learning: State-Adaptive MPQ(λ) with Ensemble Q-Networks

Non-Prehensile Model Based Manipulation and Estimation Pipeline

Amazon Robotics Co-op

SpaceX Starship Booster Structures Internship

Cornell Autonomous Underwater Vehicle Team

Robot Perception: UAV Target Tracking

Architectural Robotics Lab: Lamp Chassis

AXIS: Reactive Wall for Dense Living

One Wheel Controller Design
